Traditional, Remote-Controlled and Autonomous Vessels: A Complete Guide
There are three ways to operate an inland vessel. They are often blurred together, especially the last two. This guide sets out how each works, where each stands today, and how they connect on a single roadmap.

Ask two people in inland shipping what an autonomous vessel is, and you will often get two different answers, and neither will match what a remote-controlled vessel actually does. The terms get used interchangeably in trade coverage and marketing, which makes it hard for a fleet owner to work out what is genuinely available now, what is still a trial, and what any of it means for their own vessels.
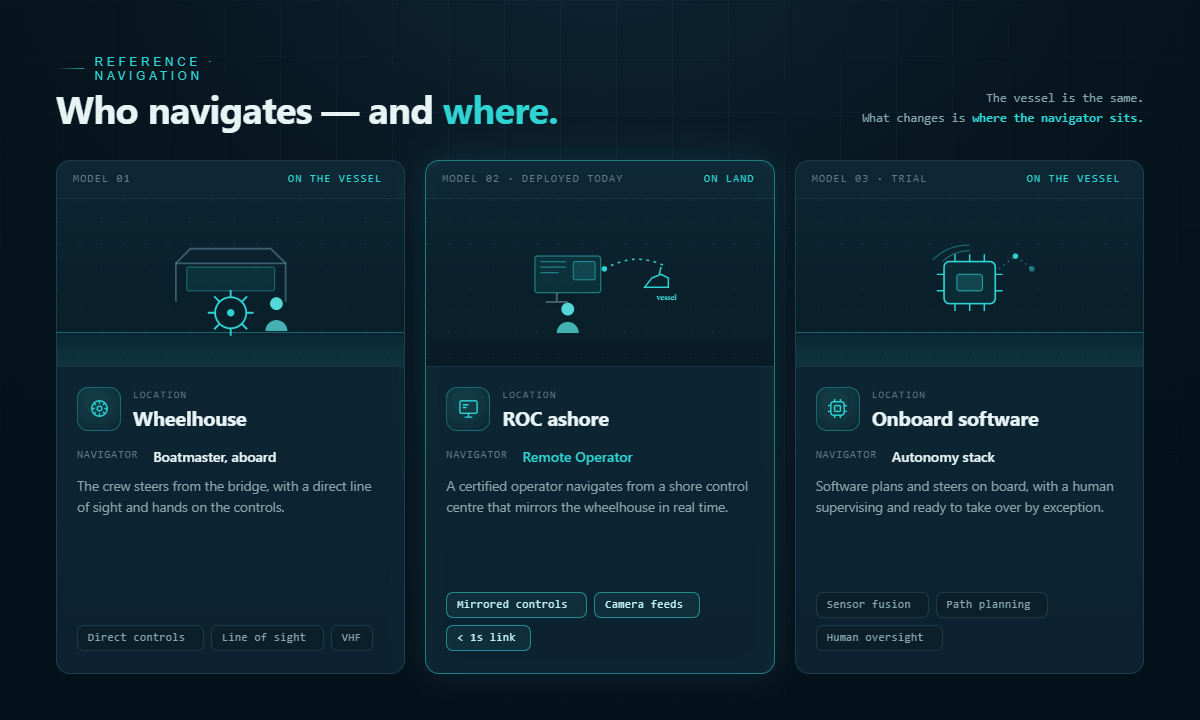
The clearest way through is to separate the models by one question: who is navigating, and where are they. That single distinction cuts cleanly between the three approaches.
The European inland fleet numbers 13,392 vessels, 9,160 in Rhine countries and 3,324 in Danube countries. These are the vessels all three operating models are competing to run.
The three operating models at a glance
In a traditional vessel, a qualified captain navigates from onboard. In a remote-controlled vessel, a qualified human navigates too, but from shore rather than onboard. In an autonomous vessel, onboard software navigates, taking routine decisions itself without a person directing each action.
Two of these keep a human in direct control of the voyage. Only the split is where that human sits. The third changes the nature of control itself. That is why traditional and remote operations sit much closer together in practice than remote and autonomous do, even though remote and autonomous are the two most often confused.
Model 1: Traditional onboard crewing
This is the baseline the sector was built on. A qualified captain, often with additional crew, is onboard for the voyage and holds full responsibility for navigation. Onboard tools may assist, but the human in the wheelhouse is in command throughout.
It is proven and universally accepted by regulators. Its limitation is not safety or capability. It is supply. Every sailing vessel needs a qualified captain physically present, and the pool of those people is shrinking as the sector faces a structural crew shortage. Under this model, fleet capacity is capped by the number of qualified people available to be onboard. When that number falls, so does the fleet's ability to keep every vessel moving.
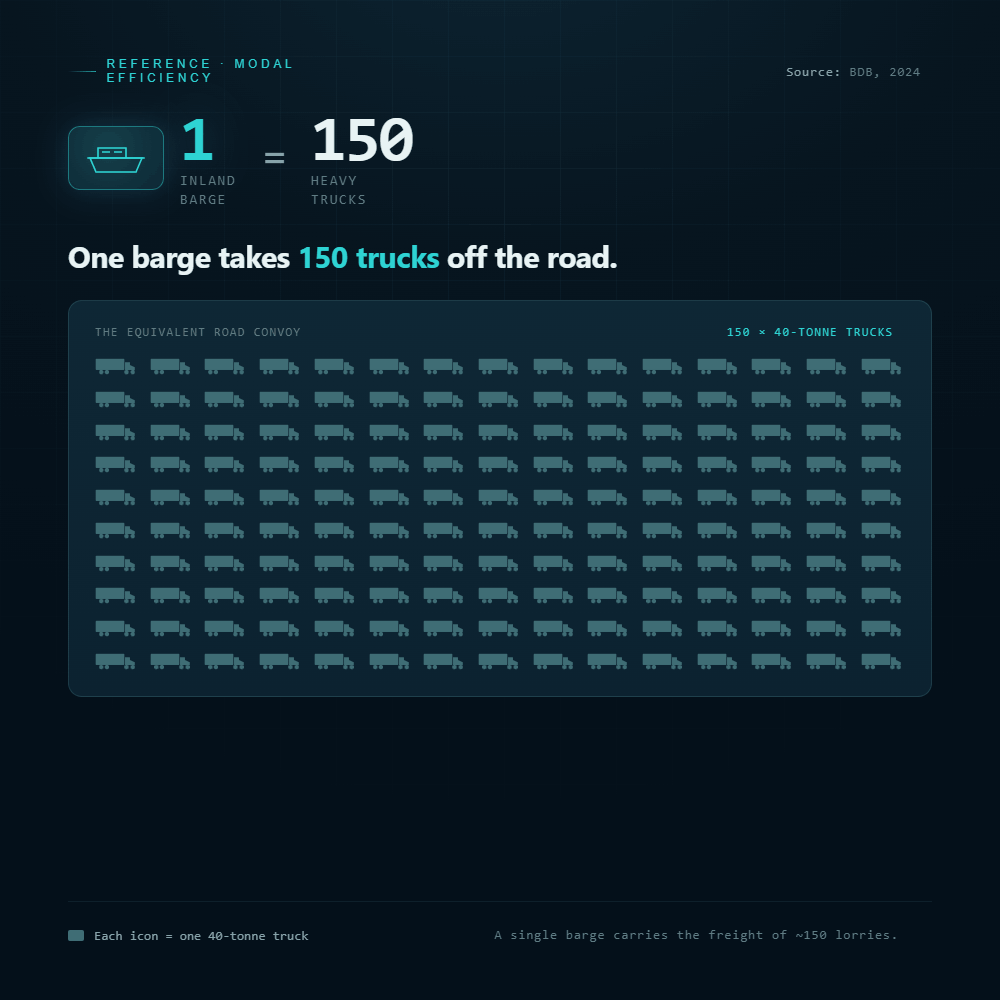
A single large Rhine barge of 3,000 tonnes replaces about 150 truck journeys. A push convoy of up to 12,000 tonnes equals roughly 480 trucks. Keeping these vessels sailing is what is at stake when crew runs short.
A common point of confusion sits inside this model. Onboard assistants such as a TGAIN, the rate-of-turn regulator that holds a vessel on a set course, are sometimes described as a step toward autonomy. They are not a different operating model. The captain stays onboard and in control. A TGAIN reduces workload; it does not remove the need for a qualified person in the wheelhouse. It belongs to the traditional model, made more comfortable.
Model 2: Remote-controlled navigation
Remote operations keeps the human navigator but moves them ashore. A vessel is connected to a Remote Operation Center, a shore-based facility where trained Remote Operators support navigation in real time using live data from the vessel. The vessel, any onboard crew, and the shore team work as one connected system.
The change is where expertise sits, not whether it is present. Navigation is still directed by a qualified person. But because that person is ashore, their expertise is no longer locked to a single wheelhouse. One team of Remote Operators can support more vessels than the equivalent number of captains confined to individual vessels. This is what lets a fleet reduce its dependency on scarce onboard crew and keep sailing when qualified captains are hard to find.
Two practical points distinguish remote operations from the autonomous vision it is often lumped in with. First, it is available today: remote-operated inland vessels are already sailing in commercial service. Second, it works on existing vessels. An inland vessel can be retrofitted with the onboard systems and secure connectivity needed to connect to a Remote Operation Center, rather than requiring a purpose-built newbuild. For a fleet owner with vessels already on the water, that is the difference between a service they can adopt and a concept they can only watch.
Remote operations also depends on more than software. It needs certified operators, secure connectivity, onboard hardware, and, critically, regulatory approval to operate a vessel from shore in a given jurisdiction. The operating and regulatory layer is what turns the technology into something a vessel can legally do, and it is the part that takes the longest to build.
Model 3: Autonomous vessels
An autonomous vessel navigates itself. Onboard sensors perceive the environment, and software takes routine navigation decisions without a human directing each action. Levels of autonomy vary, from systems that handle specific tasks under human supervision through to the long-term goal of an uncrewed vessel making its own way.
This is the direction much of the sector is heading, and there is real activity worldwide. But it is important to be accurate about where it stands. The most advanced comparable projects internationally still carry crew onboard, largely for regulatory reasons, and typically operate on single fixed routes rather than across a varied network. Full commercial autonomy for inland waterway freight, on existing multi-route fleets, is not something a fleet owner can buy today. It is being developed, trialled and demonstrated, not deployed at scale as a service.
The world's most advanced comparable project, an electric autonomous container vessel in Norway, has been commercially active since 2022 but still sails with crew onboard, on a single fixed route of around 7 nautical miles.
Autonomy also faces the same layered challenge remote operations does, only harder. The technology is one part. The operational procedures, safety governance and regulatory frameworks needed to let a vessel navigate itself among crewed traffic on shared waterways are considerable, and they are earned gradually, through evidence.
How the three models connect
It is tempting to treat these as competing options, as if a fleet must pick one. They are better understood as steps on a single roadmap, each building the conditions for the next.
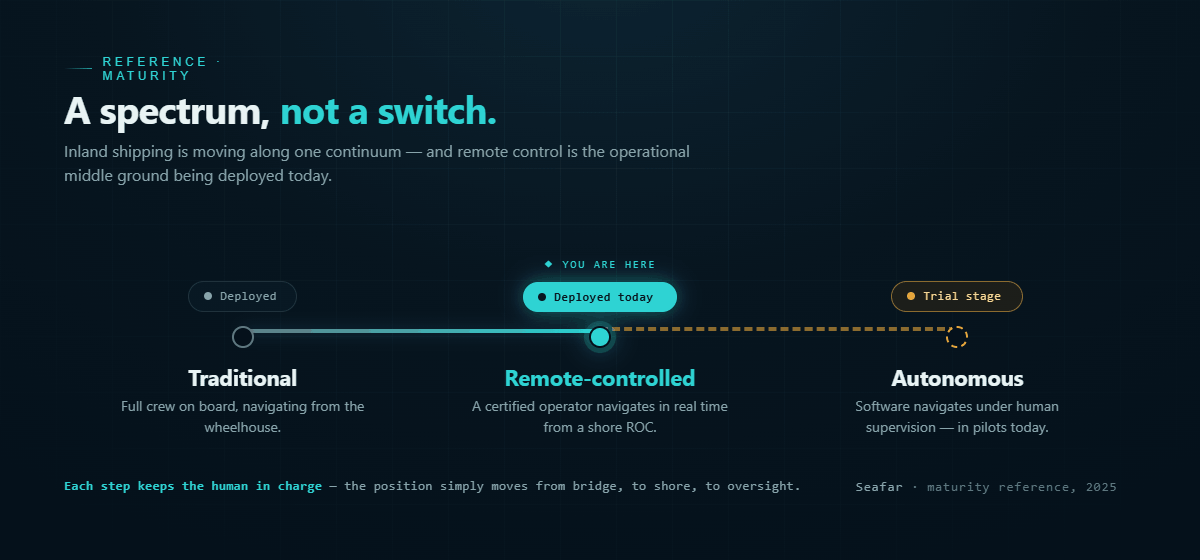
Traditional crewing is where the sector is. Autonomy is where parts of it want to go. Remote operations is the step between the two that is available now, and it is more than a waiting room. Every remote-operated voyage generates operational data, refines safety procedures, and builds regulatory precedent for operating a vessel with reduced or no crew directing it from onboard. That evidence is exactly what any credible path to autonomy requires.
In that sense remote operations is not a detour around autonomy. It is the bridge to it. It solves a problem fleets have today, the structural crew shortage, while laying the operational and regulatory groundwork that autonomy will stand on tomorrow. A fleet that adopts remote operations now is not choosing against autonomy. It is taking the step that makes autonomy reachable, and keeping its vessels sailing in the meantime.
Comparison summary
| Traditional | Remote-controlled | Autonomous | |
|---|---|---|---|
| Who navigates | Human, onboard | Human, from shore | Onboard software |
| Human in direct control | Yes | Yes | Reduced or supervisory |
| Availability for inland fleets | Standard today | Commercially deployed today | Trial and pilot stage |
| Works on existing vessels | Yes | Yes, via retrofit | Mostly purpose-built newbuilds |
| Effect on crew dependency | Full onboard crew needed | Reduced onboard crew | Aims to remove onboard navigator |
| Main constraint | Shortage of qualified crew | Connectivity, permits, operators | Technology maturity and regulation |
Questions readers ask
What is the difference between remote-controlled and autonomous vessels?
A remote-controlled vessel is navigated by a human, just from shore instead of onboard. A trained Remote Operator in a Remote Operation Center supports the voyage in real time using live data from the vessel. An autonomous vessel navigates itself using onboard sensors and software, taking routine decisions without a human directing each action. In short, remote operations relocates the human; autonomy aims to reduce the need for one in the moment. Today, remote operations is commercially deployed for inland waterways, while autonomous inland shipping remains largely at pilot and trial stage.
Is inland shipping autonomous yet?
Not in commercial service at scale. Autonomous inland and coastal projects exist worldwide, but the most advanced comparable vessels still carry crew onboard for regulatory reasons and typically run single fixed routes. Autonomy in inland shipping today is best understood as an active area of development, not a service a fleet owner can buy for an existing vessel.
How is remote operation different from a TGAIN or steering assistant?
A TGAIN, or rate-of-turn regulator, is an onboard assistant that keeps a vessel on a set course and reduces captain workload. The captain stays onboard and in control at all times. Remote operations is different in kind: it enables the vessel to be navigated from shore, so a qualified person no longer has to be in the wheelhouse for the vessel to sail. One reduces workload onboard; the other changes where the operator sits.
Can existing vessels be remote-controlled, or does it require a newbuild?
Existing vessels can be retrofitted for remote operations. This is a key practical difference from most autonomous vessel projects, which tend to be purpose-built newbuilds. An existing inland vessel can be equipped with the onboard systems and secure connectivity needed to connect it to a Remote Operation Center, without replacing the vessel.
Which operating model should a fleet choose?
The three models are steps on one roadmap rather than competing choices. Traditional crewing is the current baseline. Remote operations is the practical step available today for reducing dependency on scarce onboard crew while keeping human expertise in control. Autonomy is the longer-term direction, and the operational data and regulatory precedent built through remote operations is what makes the path toward it credible.